- Printer Model
- Voron 2.4 Pro Formbot
- Extruder Type
- Clockwork 2
- Cooling Type
- Stealthburner
Hi guys,
I am building up a Voron 2.4 Pro Formbot. Now I am trying for nearly a week to fix the issue with my gantry level.
Switching wiring of the motors doesn't help. Now I have front left -> Z0, rear left -> Z1, rear right Z2, front right Z3.
WIth this wiring I am getting this result in the quad_gantry_level:
18:14 Aborting quad_gantry_level required adjustment 353839846697334189588480.000000 is greater than max_adjust 2.000000
18:14 Average: -116979654425515982323712.000000
18:14 Actuator Positions: z: 88278656459288212406272.000000 z1: -470819501122850171912192.000000 z2: -105080336047367392329728.000000 z3: 19702563008865418346496.000000
18:14 Gantry-relative probe points: 0: 4.766250 1: 4.661250 2: 4.998750 3: 4.905000
18:14 probe at 50.000,250.000 is z=0.096250
Does someone know how this large numbers are coming up?
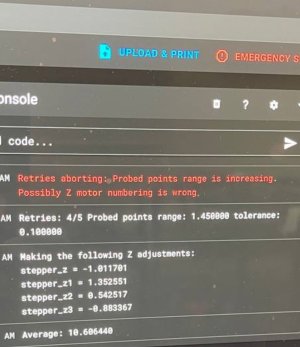
Sometimes I see the probing runs some rounds and after each round the system tries to correct the z motors. I have the feeling in the worng direction. The result is after two/three rounds that the max_adjust fails ...
I am building up a Voron 2.4 Pro Formbot. Now I am trying for nearly a week to fix the issue with my gantry level.
Switching wiring of the motors doesn't help. Now I have front left -> Z0, rear left -> Z1, rear right Z2, front right Z3.
WIth this wiring I am getting this result in the quad_gantry_level:
18:14 Aborting quad_gantry_level required adjustment 353839846697334189588480.000000 is greater than max_adjust 2.000000
18:14 Average: -116979654425515982323712.000000
18:14 Actuator Positions: z: 88278656459288212406272.000000 z1: -470819501122850171912192.000000 z2: -105080336047367392329728.000000 z3: 19702563008865418346496.000000
18:14 Gantry-relative probe points: 0: 4.766250 1: 4.661250 2: 4.998750 3: 4.905000
18:14 probe at 50.000,250.000 is z=0.096250
Does someone know how this large numbers are coming up?
Sometimes I see the probing runs some rounds and after each round the system tries to correct the z motors. I have the feeling in the worng direction. The result is after two/three rounds that the max_adjust fails ...