- Printer Model
- Voron 2.4r
- Extruder Type
- Other
- Cooling Type
- Stealthburner
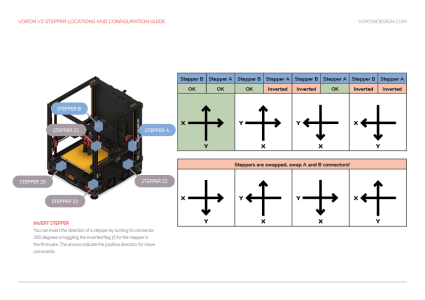
I just finish building a Voron2.4r with a Octopus Pro and with a canbus and a tap. But i have a problem with the X and Y.
When i home the X axis the machine runs to the Y and when i want to home the Y axis he runs to the X axis.
I can not find what to change so it wil work on a normal way
Is there somebody who knows what to do, i already out of option's
I already changed to motors from A to B and from B to A bus this made not changes.
Here are the settings in printer.cfg
[stepper_x]
step_pin: PF13
Dir_pin: !PF12
enable_pin: !PF14
rotation_distance: 40
microsteps: 32
full_steps_per_rotation:200 #set to 400 for 0.9 degree stepper
endstop_pin: PG6
position_min: 0
[stepper_y]
step_pin: PG0
dir_pin: !PG1
enable_pin: !PF15
rotation_distance: 40
microsteps: 32
full_steps_per_rotation:200 #set to 400 for 0.9 degree stepper
endstop_pin: !PG9
position_min: 0
When i home the X axis the machine runs to the Y and when i want to home the Y axis he runs to the X axis.
I can not find what to change so it wil work on a normal way
Is there somebody who knows what to do, i already out of option's
I already changed to motors from A to B and from B to A bus this made not changes.
Here are the settings in printer.cfg
[stepper_x]
step_pin: PF13
Dir_pin: !PF12
enable_pin: !PF14
rotation_distance: 40
microsteps: 32
full_steps_per_rotation:200 #set to 400 for 0.9 degree stepper
endstop_pin: PG6
position_min: 0
[stepper_y]
step_pin: PG0
dir_pin: !PG1
enable_pin: !PF15
rotation_distance: 40
microsteps: 32
full_steps_per_rotation:200 #set to 400 for 0.9 degree stepper
endstop_pin: !PG9
position_min: 0