Starfleet42
Member
Starting a thread here to aggregate the places I have found that have helpful information about the BIGTREETECH Octopus V1.0/1.1 Mainboard. I hope this will help others as well. If you also have helpful links, please add them to the thread, and I can add them to this post!
- VoronDesign firmware flashing info: https://docs.vorondesign.com/build/software/octopus_klipper.html
- VoronDesign wiring info: https://docs.vorondesign.com/build/electrical/v2_octopus_wiring.html
- GitHub repo by BIGTREETECH: https://github.com/bigtreetech/BIGTREETECH-OCTOPUS-V1.0
- 3DWork article, lots of info, step-by-step instructions: https://3dwork.io/en/btt-octopus/
- GitHub by TeamGloomy with pinout diagram: https://teamgloomy.github.io/images/btt_octopus_1.1_pins.png
- From StevenB: GitHub repo by GadgetAngel, great pinout diagram: https://github.com/GadgetAngel/BTT_Octopus_Color_PIN_Diagram
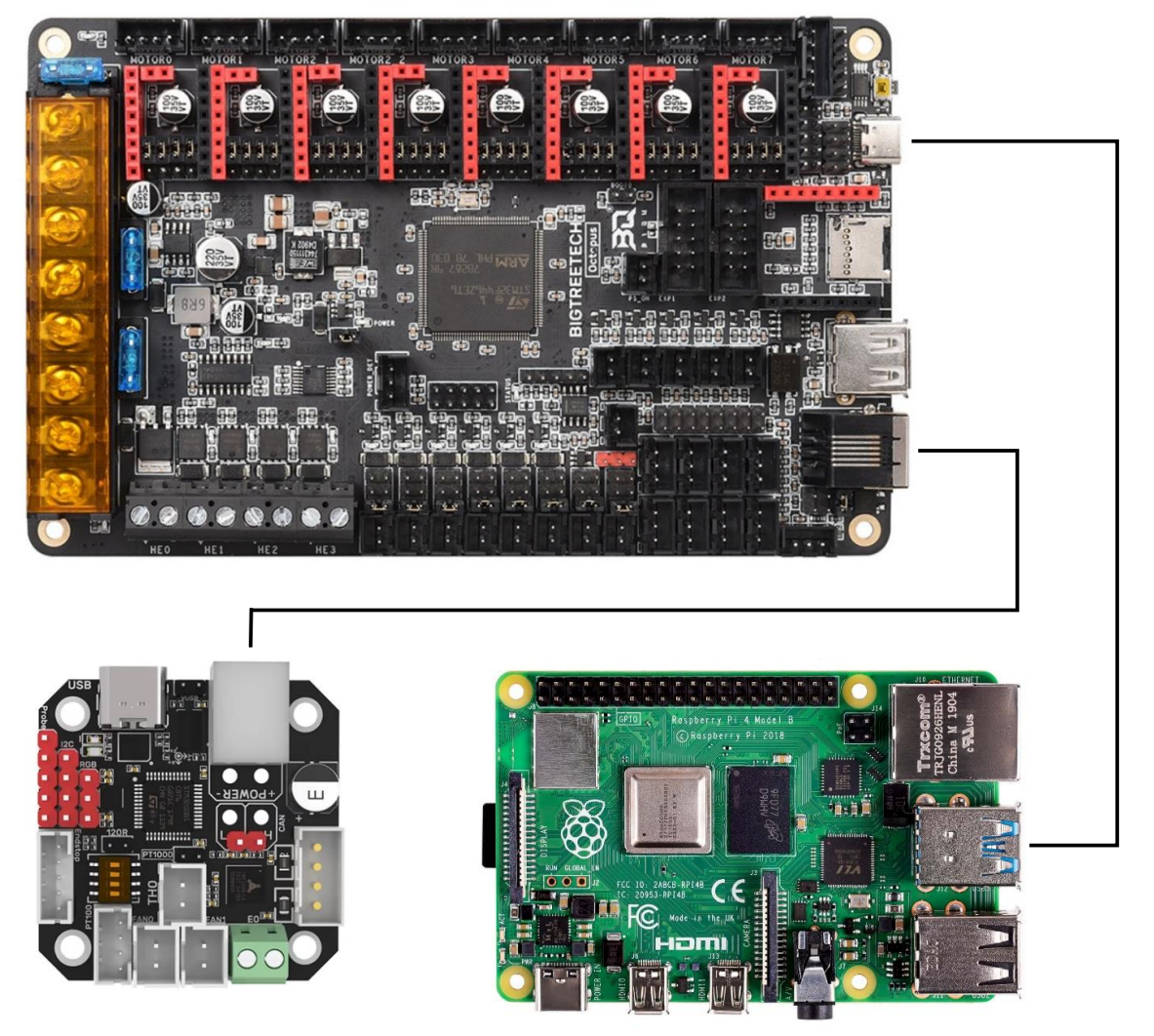
- From Indeed: TeamFDM article on using Octopus with CAN boards: https://www.teamfdm.com/forums/topi...ed-directly-to-octopus-octopus-pro-on-canboot
Last edited:
") I think I remember referencing that one at some point too.
I think I remember referencing that one at some point too. so I already have a CAN hat for my pi and I don't really need this, but I was just wondering.
so I already have a CAN hat for my pi and I don't really need this, but I was just wondering.